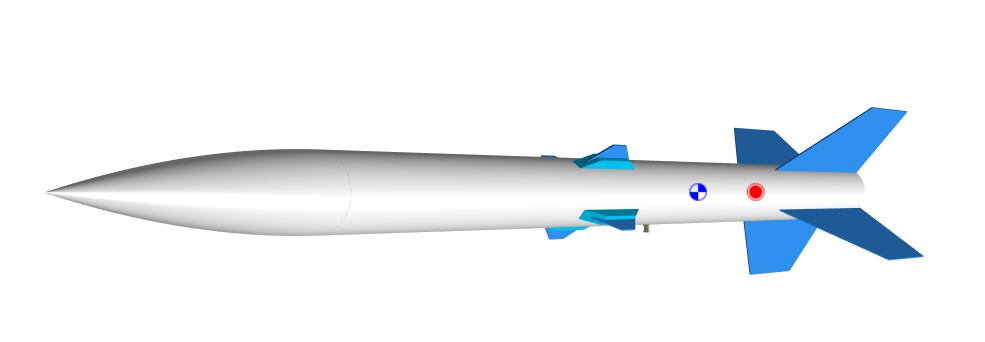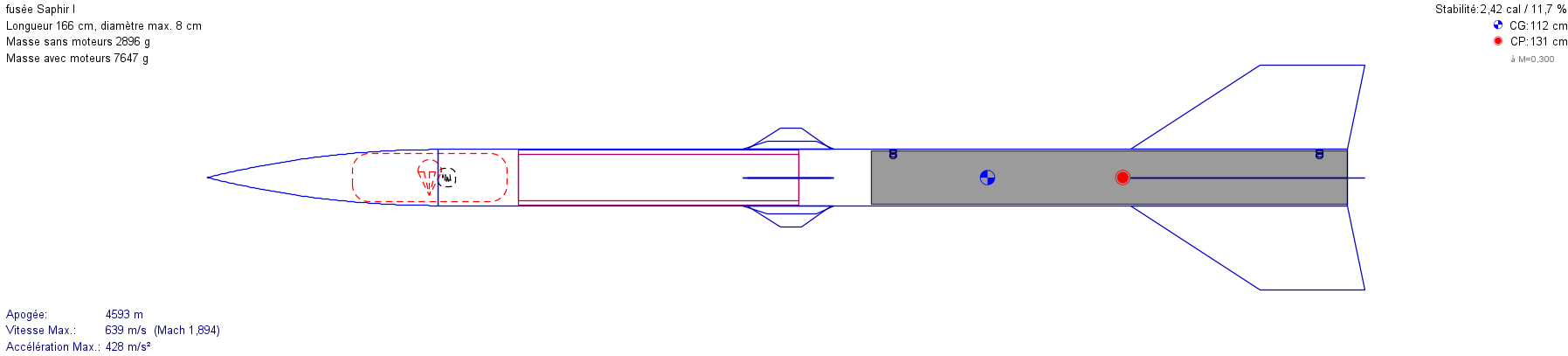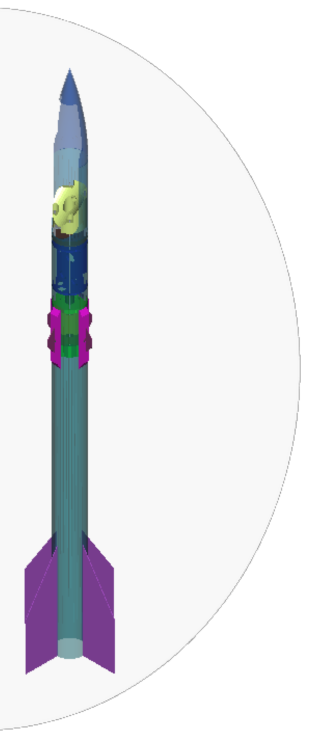
Je suis un lycéen passionné de fabriquer des projets techniques dans mon coin. Actuellement, j'ai réalisé Environ 40 % de l'avancement de la fusée expérimentale, également appelée FUSEX. Il s'agit d'une fusée capable d’atteindre jusqu'à 3000 mètres d’altitude, en fonction des limitations imposées par la législation. La fusée devrait mesurer 1,60 mètre et peser moins de 3.5 kg sans le moteur. Elle devrait être capable de résister à une accélération de 30g au maximum, générée par un moteur à poudre, ainsi qu’à une vitesse superieur à mach 1, qui sera la vitesse maximale estimée du vol avec un moteur particulier. Ceci sont des estimations de la vitesse/altitude/accélération maximum de la fusée et ce ne seront sûrement pas les "vraies" données. Les "vraies" données seront plus basse dus a la différence de moteur mis dans la fusée ainsi qu'à certaines perturbations dans l'air.
<---- image de la fusée sur freeCAD
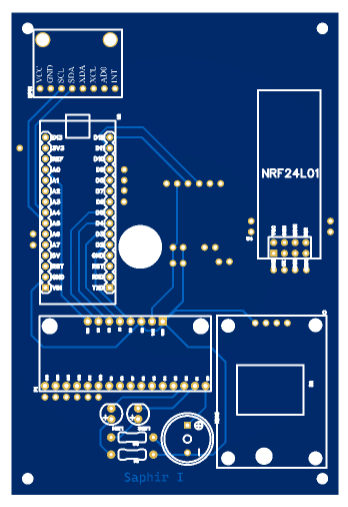
Le fuselage de la fusée sera entièrement réalisé en fibre de verre (ou en fibre de carbone si le budget le permet). En ce qui concerne l’ordinateur de bord, le PCB a été conçu à l’aide de EasyEDA (pour la conception) et fabriqué par JLCPCB. (Toute la conception a été entièrement réalisée par moi sur EasyEDA.) L’ordinateur de bord a plusieurs objectifs :
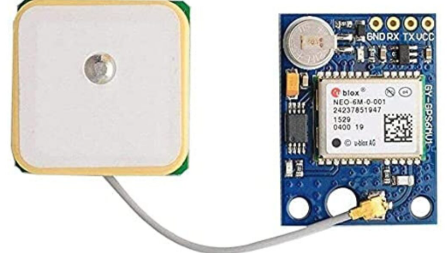
Pour connaître la position de la fusée, j'utiliserai un module GPS NEO-6M, un composant fiable, largement répandu et bien
documenté en ligne.
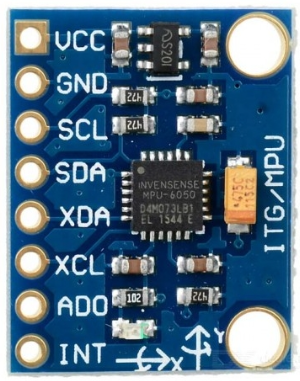
Pour connaître l’orientation de la fusée, j'utiliserai un capteur gyroscopique MPU6050, lui aussi bien documenté sur Internet.
(Il est probable que ce capteur soit remplacé par un modèle plus précis si des fonds supplémentaires sont disponibles.)
Pour estimer la vitesse de la fusée, l’utilisation du GPS est nécessaire mais j'utiliserai aussi le gyroscope a titre
experimental. Toutefois, le gyroscope manque de précision. Il est donc indispensable de trouver un autre moyen de mesurer la
vitesse. J'utiliserai donc un baromètre pour déterminer l’altitude, ainsi qu’un tube de Pitot pour mesurer la vitesse.
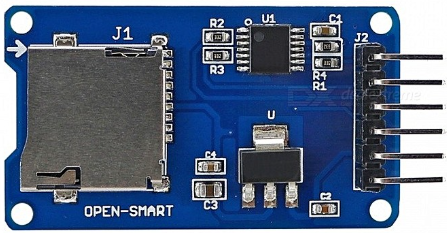
Pour enregistrer les données, j'utiliserai un simple module de carte SD compatible Arduino. Pour la télémétrie, j'utiliserai
un module radio NRF24L01, qui permettra de transmettre les données vers une station au sol.
Pour le guidage de la fusée (contrôle d’attitude actif), trois informations sont indispensables : la vitesse, l’orientation et la
position — comme indiqué précédemment. Le système de guidage comprendra également des servomoteurs contrôlant des ailerons situés
dans la partie haute de la fusée (afin de faciliter le contrôle et la maintenance). Ce système est interdit en France, et ne sera donc
pas utilisé en vol. (Je ferai probablement voler la fusée, mais sans le système de guidage, qui sera construit uniquement pour relever le
défi technique.)
Pour contrôler tous ces modules, j'utiliserai un Arduino Nano, relié à l’ensemble via un PCB conçu sur EasyEDA et fabriqué par
JLCPCB.
L’alimentation sera assurée par une batterie NiMH de 6V pour l’électronique, et une pile 9V pour l'ordinateur de secour. La baterie NiMH a une
capacité de 2400mA. Cependant, la tension fournie par la batterie n’est pas directement adaptée au circuit, qui nécessite du
3.3V et du 5V. Nous utiliserons donc des régulateurs de tension LM2596, qui permettront de convertir la tension de manière stable vers
les valeurs requises.